
















Table of Contents
目录
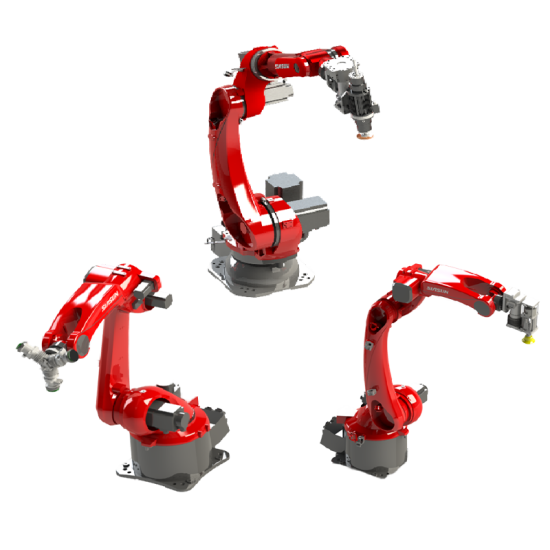
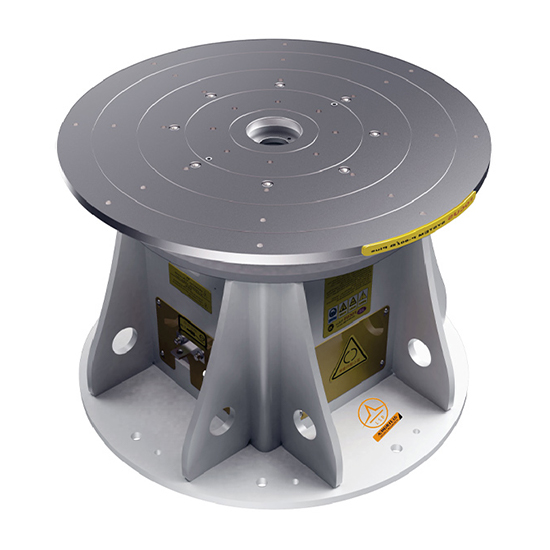
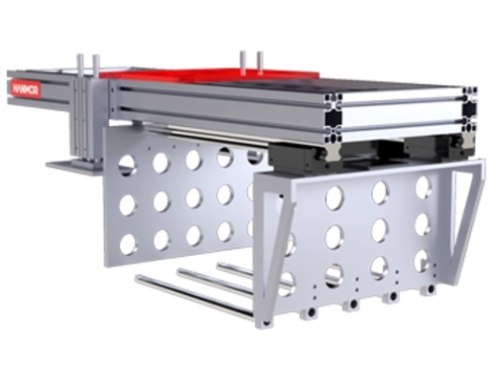
关于立柱式码垛机器人
立柱式码垛机是一种采用立柱式机器人的自动化物料堆垛设备。它主要由控制系统、驱动系统、机械系统和夹具组成。
坐标码垛机一次可以抓取两条传送带,在两个工位堆垛物料,每小时可堆垛 300-500 袋。



机器人参数
| 自由度 | 4轴 | 体重 | 750公斤/850公斤 |
|---|---|---|---|
| 有效载荷 | 100公斤 | 电源容量 | 三相 380V / 6kVA |
| 最大工作半径 | 2000毫米 | 线性导轨 | HIWIN |
| 重复定位精度 | ±0.15毫米 | 行星减速器 | 顶点 |
| S轴范围 | ±240° | 房车减速器 | SWITECH |
| Z轴行程 | 2000毫米 | 伺服电机 | 创新 |
| R轴范围 | ±300° | 司机 | 创新 |
| T轴范围 | ±360° | 材料 | 钢结构 |
| S轴最大速度 | 2.1 弧度/秒 (120°/秒) | 适用夹具 | 夹紧式,板式 |
| Z轴最大速度 | 300 毫米/秒 | 转动惯量 | 16 公斤/平方米 |
| R轴最大速度 | 1.74 弧度/秒 (100°/秒) | 参考速度解包 | 300-500 包/秒(因工艺而异) |
| T轴最大速度 | 6.28 弧度/秒 (360°/秒) | ||
| 温度 | 0–45℃ | 湿度 | 相对湿度20%–80%(无冷凝) |
| 振动 | <4.9 米/秒² (0.5G) | 笔记 | 避免接触易燃/腐蚀性气体或液体;避免接触水、油和灰尘;远离电气噪声源。 |
RVS-SE 标准 3D 视觉概述
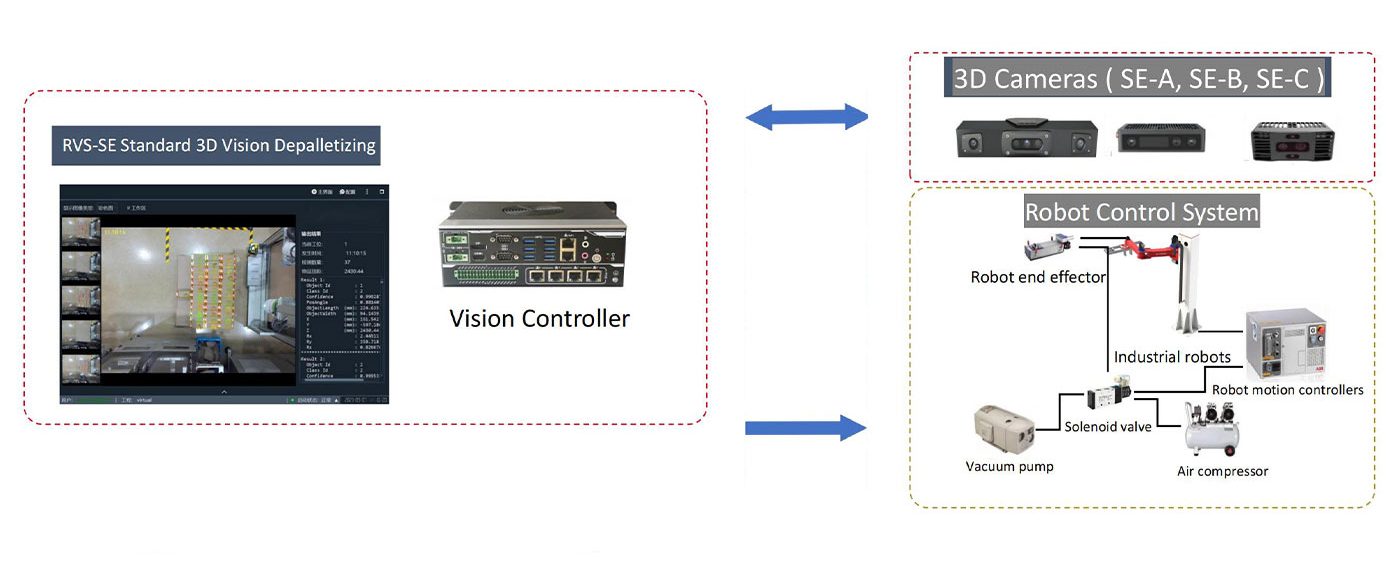
选材指南
| 3D相机 | RVS-SE-A | RVS-SE-B | RVS-SE-C |
|---|---|---|---|
| 视觉控制器 | IPC5C396 | IPC5C396 | IPC5C396 |
| 安装方法 1 | 眼外手 | 眼外手 | 眼外手 |
| 电源线 | TY-PW/IO-M12A8-10M-24V | TY-PW/IO-M12A8-10M-24V | TY-PW/IO-M12A8-10M-24V |
| 数据线 | TY-E-M12X8-RJ45-10M-H | TY-E-M12X8-RJ45-10M-H | TY-E-M12A8-RJ45-10M-H |
| 安装方法 2 | – | 手眼 | 手眼 |
|---|---|---|---|
| 电源线 | – | TY-PW/IO-M12A8-10M-24V | TY-PW/IO-M12A8-10M-24V |
| 数据线 | – | TY-E-M12X8-RJ45-10M-H | TY-E-M12A8-RJ45-10M-H |
| RVS-SE | 校准板(可选) | RCCB-54 | RCCB-54 |
|---|---|---|---|
| RVS-SE | 照片处理时间 | 4秒 | 2.5秒 |
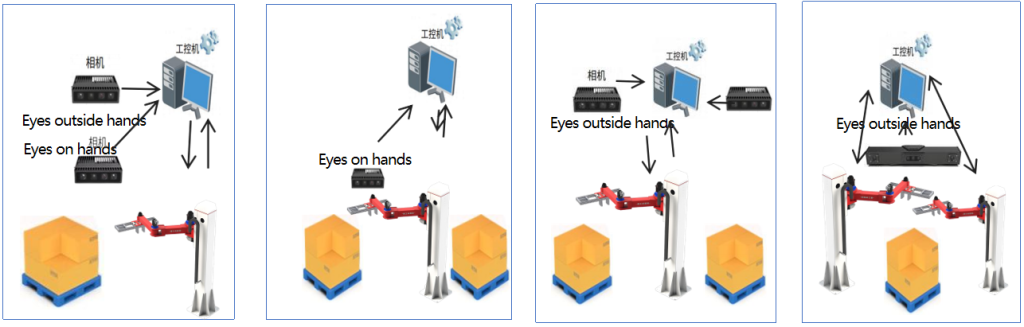
| 相机 | 单摄像头(手内眼/手外眼) | 单机位拍摄(手持相机) | 多摄像头(手部外侧眼睛) | 单摄像头(手部外侧) |
|---|---|---|---|---|
| 堆叠数量 | 单栈 | 多栈 | 多栈 | 单栈 |
| 视觉控制器 | 单IPC | 单IPC | 单IPC | 单IPC |
| 机器人 | 单机器人 | 单机器人 | 单机器人 | 多机器人 |
| 执行 | 简单易部署,最常用 | SE软件会在不同的配方之间切换。 | SE软件切换摄像头和食谱以进行串行操作;摄像头不能同时工作。 | SE软件会在不同的配方之间切换。 |
| 应用场景 | 情景① | 情景 ② | 情景③ | 场景④ |
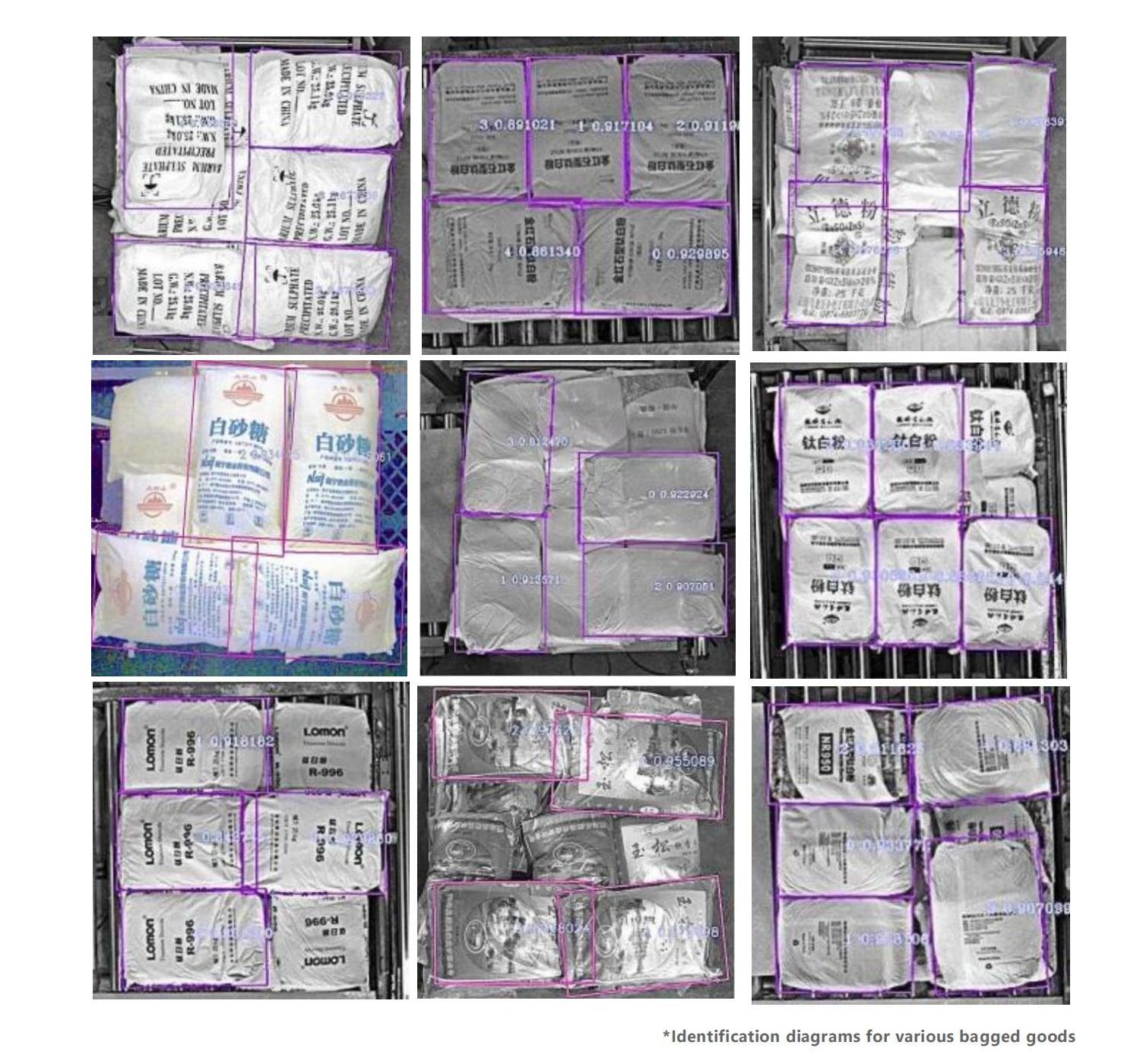
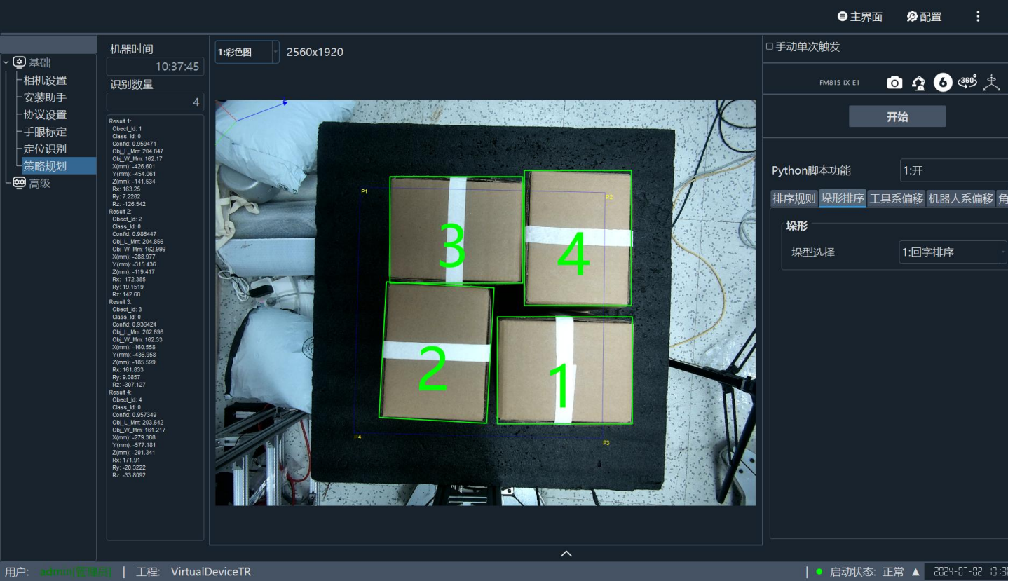
使用3D相机拍摄的真实照片
RVS-SE软件功能介绍
手眼校准
| 序号 | 机器人类型 | 校准板法 | TCP测试抓取方法 | TCP 尖端接触法 | 自动模式 | 手动模式 |
|---|---|---|---|---|---|---|
| 1 | 六轴机器人 | √ | √ | × | √ | √ |
| 2 | 四轴机器人 | √ | √ | × | √ | √ |
| 3 | 龙门机器人(3-6轴) | × | √ | √ | × | √ |
战略规划
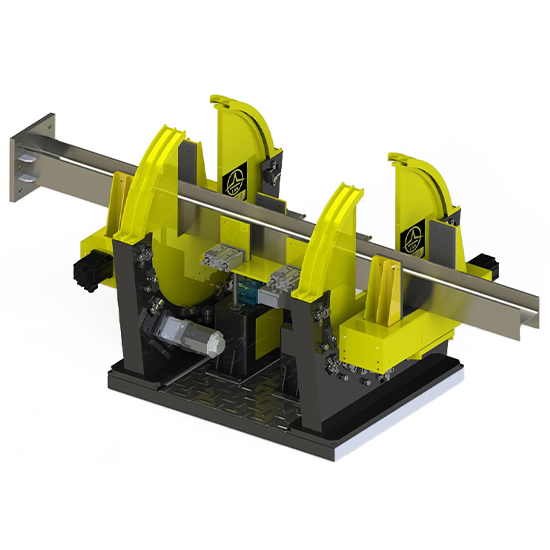
夹持器
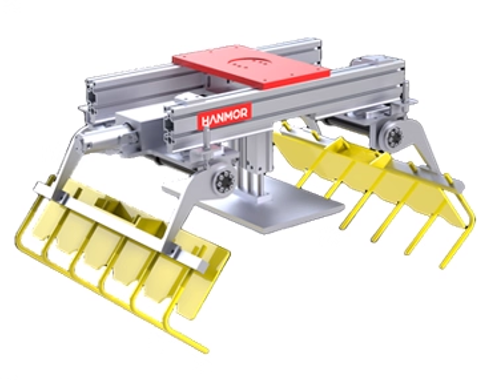
码垛机夹具
- 精密机械结构
- 稳定精准的抓握
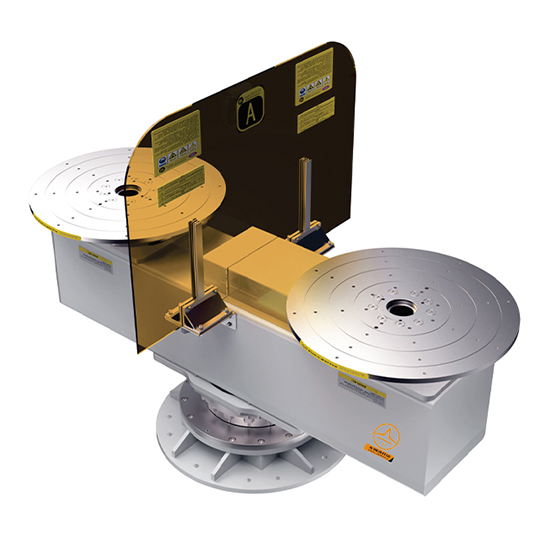
码垛机电动螺旋夹爪
- 专业传感器技术
- 智能控制算法
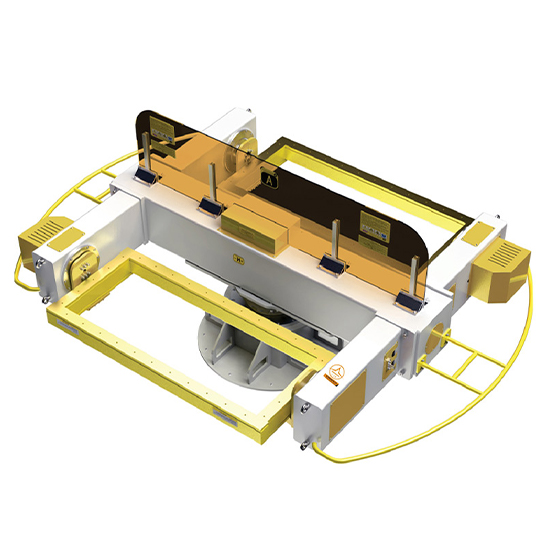
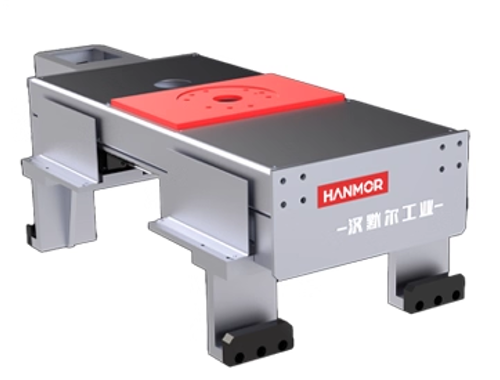
码垛机上下盖夹
- 全自动、快速、高效
- 整齐、坚固且美观的托盘摆放

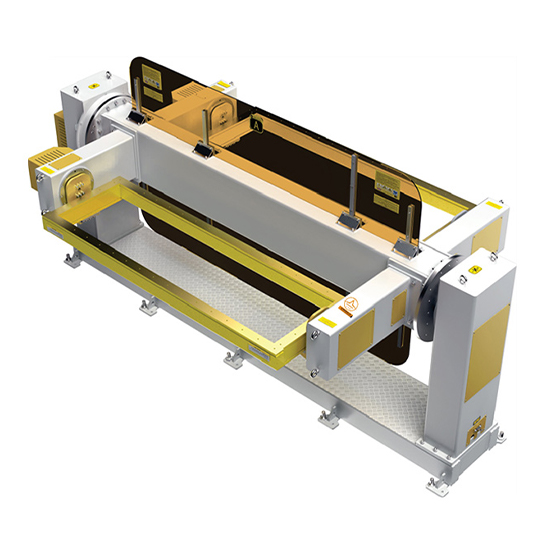
纸箱码垛机用气动夹具
- 全自动、快速、高效
- 结构简单,易于安装
海绵吸盘式
- 应用范围广,使用寿命长
- 柔软且不易刮花

码垛机内部吸盘气动夹具
- 承载能力强,夹持稳定
- 材料不会脱落
码垛机器人应用现场





