



















目录
目录
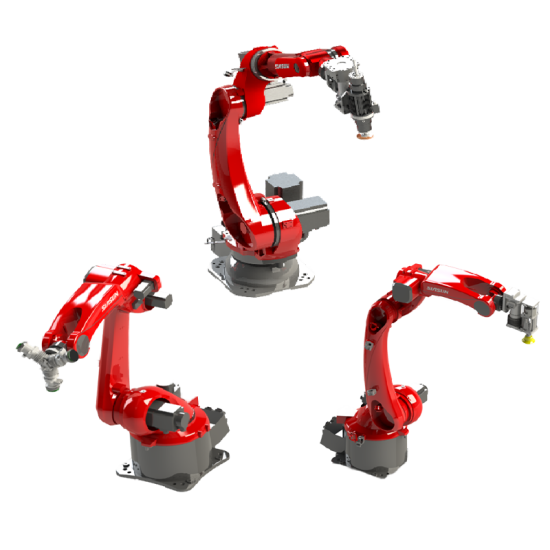
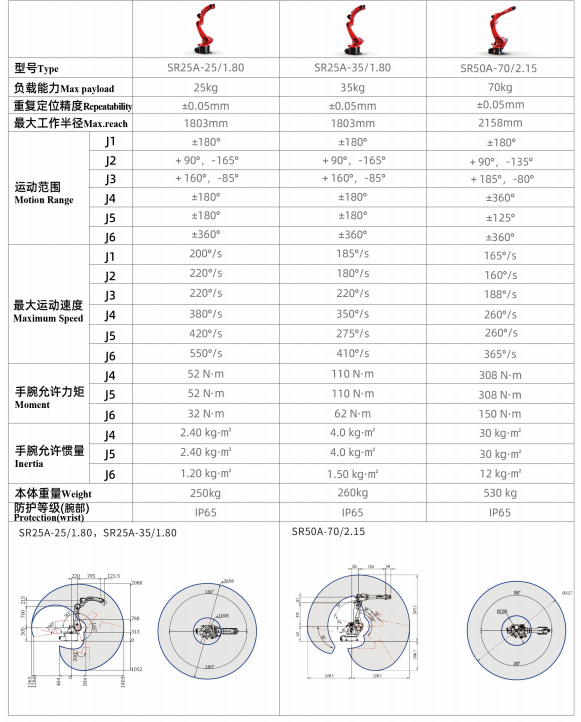
产品参数



SR50A-70/2.15 标准配置

| 名称 | 型号 | 产品描述 | 数量 |
| 机器人 | 新松 SR50A-70/2.15 | 机器人本体,M6控制柜(套机款)与 标准M6柜区别如下: 1. 内置力控控制控制; 2. 内置主轴变频器; 3. 内置自动换刀阀岛; 4. 内置制动电阻(与变频器配合)。 | 1 |
| 管线包 | SR50A(加长型) | 波纹管、接头、支架机加件(含网球拍)、弹簧机构等。 | 1 |
| 力控系统 | M5308T35G | 浮动力控制系统,包括浮动头和控制器(内置) 浮动行程:35mm 力控制范围:0–500N 负载能力:30kg | 1 |
| 电主轴 | M5308S35A12-01 | 打磨主轴,双出轴,直磨轴端可自动换刀,角磨端手动耗材,2.2KW,8000rpm | 1 |
| 刀柄 | 5308S35A12-40 | 主轴刀柄(夹持角磨类、海绵托盘等) | 2 |
| 软件包 | V2.3.1 | 具备主要功能:力控界面、断点恢复、摆动打磨、余高检测、路径规划、快捷键模块等 | 1 |

SR25A-35/1.80 标准配置


| 名称 | 型号 | 产品描述 | 数量 |
| 机器人 | 新松 SR25A-35/1.80 | 机器人本体,M6控制柜(套机款) 与标准M6柜区别如下: 1. 内置力控控制控制; 2. 内置主轴变频器; 3. 内置自动换刀阀岛; 4. 内置接头面板 | 1 |
| 管线包 | SR25A(加长型) | 波纹管、接头、防撞球、支架机加件等。 | 1 |
| 力控打磨工具系统 | M5305R25GF2-01 | 浮动力控,控制器和互联线缆、 浮动行程:25mm,力控制范围:0–300N,负载能力:14kg | 1 |
| 单出轴,可自动换刀,1.3kW,6000rpm; 含变频器、主轴刀柄(兼容角磨机工具和海绵垫)。 | |||
| 软件包 | V2.3.1 | 具备主要功能:力控界面、断点恢复、摆动打磨、 余高检测、路径规划、快捷键模块等。 | 1 |

SR25A-25/1.80 标准配置

| 名称 | 型号 | 产品描述 | 数量 |
| 机器人 | 新松 SR25A-25/1.80 | 机器人本体,M6控制柜(套机款) 与标准M6控制柜区别如下: 1. 内置力控控制控制; 2. 内置工具启停阀岛; 3. 内置接线面板 | 1 |
| 管线包 | SR25A(加长型) | 波纹管、接头、防撞球、支架机加件等 | 1 |
| 力控打磨工具系统 | M5285M10 | 浮动力控、控制器和互联线缆 ;浮动行程:10mm,力控范围:0-50N,负载能力:7kg; | 1 |
| OPT气磨机*3套,500L/min(2园,1方) | |||
| 软件包 | V2.3.1 | 具备主要功能:力控界面、断点恢复、摆动打磨、余高检测、路径规划、快捷键模块等。 | 1 |

自动工具/砂盘更换器(可选)

自动换刀装置
- 用于存放备用刀架,方便主轴自动换刀,提供更多磨/抛工艺选择,提高产线柔性。
- 标准 5 刀位,带刀位检测传感器;刀位数量可定制。
- 配备防尘罩;I/O 控制轻松开关防尘罩,抵抗恶劣的工作环境。
- 标配刀库支架,方便固定到项目现场。
- 适配多种耗材;可根据工位数量定制,不影响打磨节拍。
自动换砂库
- 用于存放备用砂纸,方便自动更换砂纸,提供更多磨/抛工艺选择,提高产线柔性。
- 砂纸自动剥离,并存放在废砂纸箱中。
- 标准 2 个备用砂纸位;砂纸位数量可定制(客户自行到厂家购买)。
- 带砂纸检测功能,识别砂纸是否缺失或损坏。
注:对于偶尔需要更换工具的情况,我们建议客户自行制作工具以节省成本。出于安全考虑,对于需要频繁更换工具的情况,我们建议客户购买专用工具。
配件介绍

完善定制软件包
力控制过程软件
● 实时显示刀具 ID、设定/实际力和浮动值。
● 支持力警告、工具进入/退出力设置和位移警报。
● 可进行称重、校准和重置。
● 提供执行器和工具控制的命令。
● 直接连接机器人——无需PLC/PC。
断点恢复函数
● 如果机器人的研磨过程因警报或其他原因停止,研磨机器人程序可以在重新启动时通过在断点附近执行断点恢复功能来恢复间歇研磨。
振荡抛光功能
● 抛光应用程序采用独特的摆动弧形指令来模拟手动抛光过程,从而提高抛光效果。
残余高度检测功能
● 利用力控制装置内置的位移传感器采集数据,并通过算法检测研磨高度,从而形成研磨过程的闭环控制。
安全控制模块
● 力控研磨工具和机器人在发生故障时可以安全地相互锁定。
快速磨练路径规划
● 操作人员只需通过专用界面记录少量点和路径密度,即可快速生成抛光作业,无需专业编程知识,只要了解产品工艺流程即可。(适用于简单的大面积整体抛光场景)
优化定制软件包(界面示例)

力控制过程软件

往复式研磨腔

实时状态显示
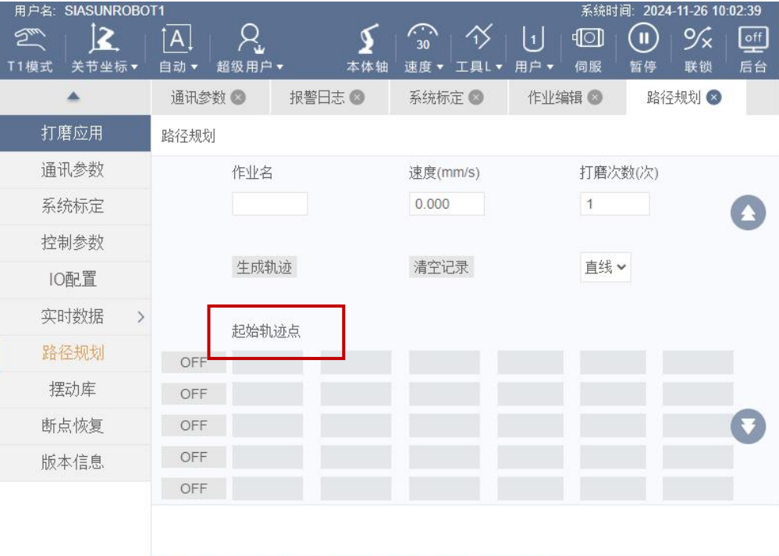
快速规划抛光路径
离线编程软件包
- SIAROBTSIM-Siasun 离线编程具有仿真、循环分析、运动轨迹规划和 3D 可视化等功能,可实现快速离线作业规划。
- 离线编程软件 + 快速编程插件:无需选择点或拖动即可快速生成轨迹,效率提高三倍。
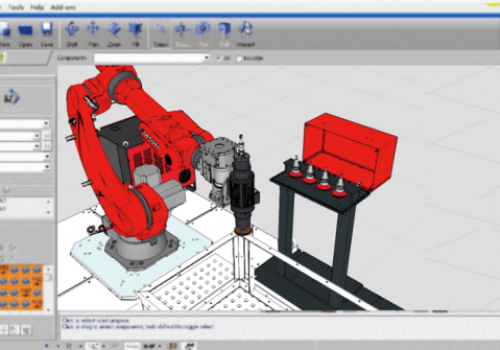
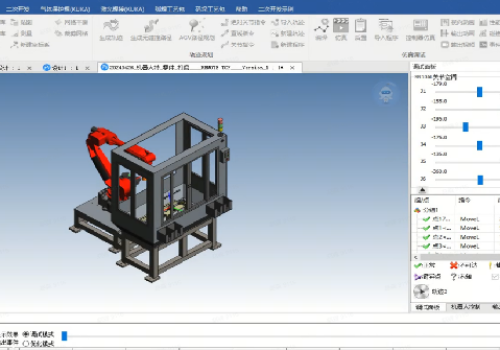
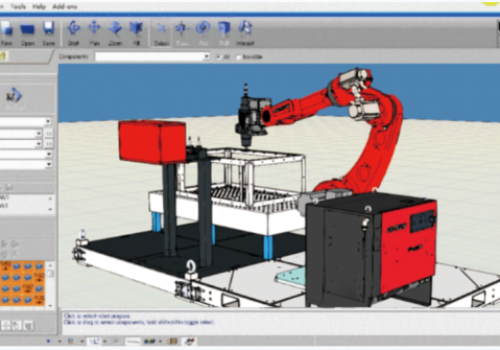
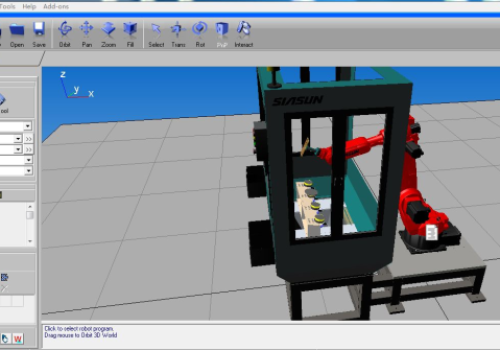
离线编程软件示例
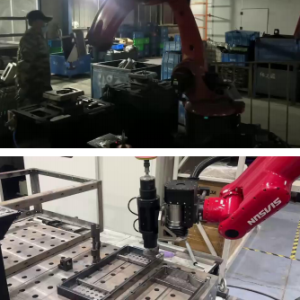
行业解决方案

方案解决方案
- 中厚板焊缝打磨
- 可配置50公斤、70公斤和210公斤的体重
- 采用重型力控工具
解决方案优势
- 力控制系统,实现精确控制和一致的研磨效果
- 支持三维焊接位置检测和姿态补偿技术,实现精确且灵活的定位
- 配备 Siasun 专用离线接口库,支持上层计算机平台和自动化流程管理
- 高扭矩力控式带式砂光机系统,效率卓越
方案解决方案
- 薄板焊接打磨
- 可配置35公斤、50公斤和70公斤三种规格的机身
- 采用轻型力控制工具
解决方案优势
- 力控制系统,实现精确控制和一致的研磨效果
- 支持点激光平面高度差检测,具有高性价比
- 包含适用于各种材料焊缝打磨的打磨工艺包
- 新型陶瓷砂带,使用寿命更长,纹理更佳。

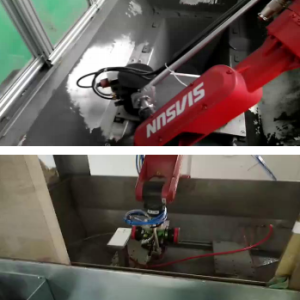
方案解决方案
- 高压铝铸件清洗(毛刺小于1毫米)
- 可配置7公斤、12公斤和25公斤的体重
- 采用气浮式清洁工具
解决方案优势
- 负载重量小、转速高、研磨精度高。
- 智能离线编程软件可自动规划路径并快速生成研磨轨迹,从而减少人工干预。
- 同时支持在线高精度三维特征检测和姿态补偿技术,从而提高工件适应性。

方案解决方案
- 高压铝铸件的清洗(中大型毛刺,2mm及以上)
- 可配置50公斤和70公斤主轴
- 使用电工主轴清洁工具
Solution Advantage
- High spindle rigidity, high speed, and high grinding precision
- Intelligent offline programming software automatically plans the path and quickly generates the grinding trajectory, reducing manual intervention
- Simultaneously supports online high-precision 3D feature detection and attitude compensation technology, resulting in better workpiece adaptability
方案解决方案
- 3C电子产品外壳研磨
- 可配置7公斤、12公斤和25公斤的机身
- 采用气动砂纸式力控制工具
解决方案优势
- 集成工具,高度集成,易于部署
- 可配置的研磨工艺包,适用于抛光各种材料
- 内置轨迹规划软件,减少人工干预
- 智能离线编程软件能够快速生成复杂工件的磨削轨迹,效率提升一倍。
方案解决方案
- 汽车内饰件抛光
- 兼容12公斤、25公斤和50公斤的机身单元
- 采用气动砂纸式力控制工具
解决方案优势
- 集成工具,高度集成,易于部署
- 力控系统,精确控制,抛光精度高
- 配备抛光工艺包,可适应各种材料的抛光。
- 智能离线编程软件能够快速生成复杂工件的抛光轨迹,效率提升一倍。

方案解决方案
- 鞋面预处理和研磨(鞋服行业)
- 可配置25公斤和35公斤两种型号
- 采用电动浮动工具
解决方案优势
- 机身采用最新的Siasun 5.0软件系统
- 更流畅的姿态变化、更精确的轨迹控制、更高的研磨精度和良好的一致性
- 智能离线编程软件能够快速生成多种工件模型的磨削轨迹,效率提升一倍。